笛卡尔坐标机器人的中英文名称解释
引言:笛卡尔坐标机器人的英文全称是Cartesian coordinate robot,它经过中文翻译之后就是直角坐标机器人。然而由于功能及使用上的不同,又将直角坐标机器人进行了细分。本文将带你了解与笛卡尔坐标机器人相关的一些中英文名称的含义。
笛卡尔机器人或线性机器人都可以统称为工业机器人,其中三个控制轴(XYZ轴)沿直线移动而不是旋转。同时,它们的控制轴(XYZ轴)彼此成90°角,三个滑动关节可上下,左右,前后线性移动。因此,有时候会将笛卡尔机器人称为线性机器人。
线性机器人(Linear robot)
由于笛卡尔机器人的三个滑动关节可上下,左右,前后线性移动,故有线性机器人之称。
笛卡尔机器人控制臂解决方案通常用于CNC加工,3D打印以及铣床和绘图机。取放机器还可以在线性的笛卡尔坐标机器人上运行。其中有一种笛卡尔机器人是龙门机器人,它的水平方向上的两端都被支撑。
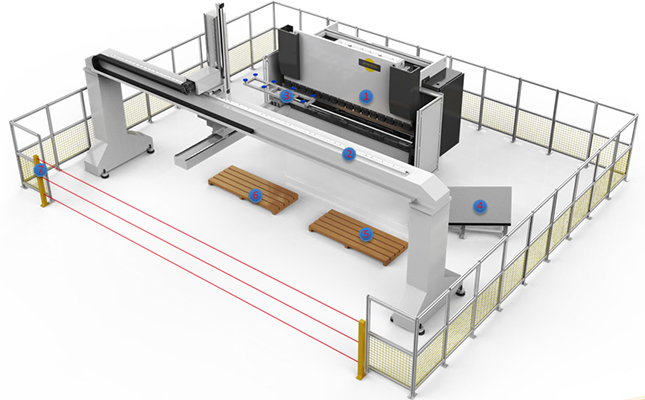
龙门机器人(Gantry robot)
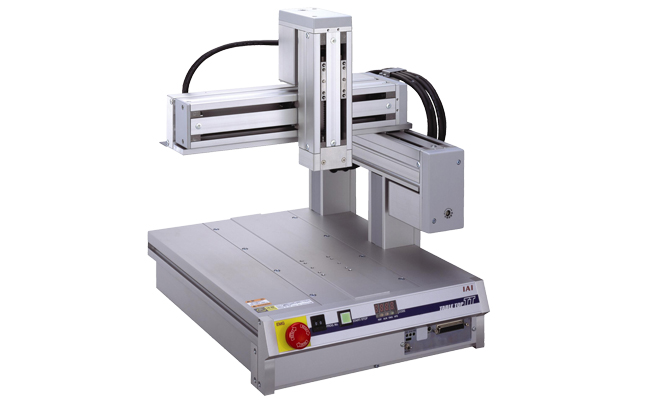
龙门机器人是笛卡尔机器人的其中一种,是由于在使用功能上需要将它水平方向上的两端都被支撑,于是就有了一种龙门的形状,故被称之为龙门机器人,如下图中②即为水平方向上的两端支撑起来的龙门。
综上,无论是线性机器人还是龙门机器人,其实都是笛卡尔坐标机器人的一种别称。下面,彩店宝来进一步了解一下笛卡尔坐标机器人,也就是中文翻译后的直角坐标机器人。
笛卡尔机器人(Cartesian robot)
笛卡尔坐标系(Cartesian coordinates)就是直角坐标系和斜坐标系的统称。相交于原点的两条数轴,构成了平面放射坐标系。如两条数轴上的度量单位相等,则称此放射坐标系为笛卡尔坐标系。两条数轴互相垂直的笛卡尔坐标系,称为笛卡尔直角坐标系,否则称为笛卡尔斜角坐标系。而笛卡尔机器人指的就是笛卡尔坐标机器人。
直角坐标机器人(Cartesian coordinate robot)
直角坐标机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。又称大型的直角坐标机器人,也称桁架机器人或龙门机器人,其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动来进行的。
桁架机器人(Gantry robot)
桁架机器人是一种建立在直角X,Y,Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其实桁架机器人的名称就是来自龙门机器人,因为龙门很多时候会被称为龙门架,而龙门架又可以称为桁架,所以就有了桁架机器人的说法。
综上,桁架机器人、龙门机器人、线性机器人的工作原理是相同的,都是笛卡尔机器人的一种,而笛卡尔坐标机器人(Cartesian coordinate robot)经过中文翻译之后就是直角坐标机器人。到此,相信在看完彩店宝这篇文章之后,大家在直角坐标机器人上的一些名称困惑,应该能得到解答了吧。